
Overview of calculus
Featured

Limits
Featured


Derivatives
Featured

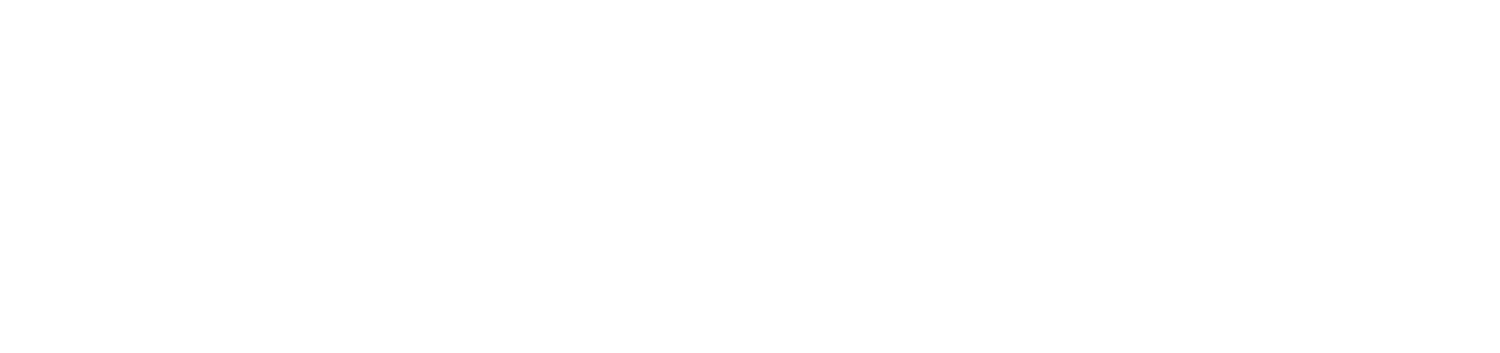
Optimization problems
Featured



Chain rule
Featured

Integrals
Featured








Solids of revolution
Featured


Series
Featured

In this lesson, we'll derive Maclaurin/Taylor polynomials which are used to "approximate" arbitrary functions which are smooth and continuous. More generally, they are used to give a local approximation of such functions. We'll also derive Maclaurin/Taylor series where the approximation becomes exact.